






















Pametna kamera Omron FHV7
09.09.2022
Zmogljivost sistemov strojnega vida v eni napravi.
 Glavni izziv pri izboru ustrezne kamere za strojni vid je zagotoviti, da bo sistem dovolj zmogljiv in prilagodljiv vsem zahtevam končne aplikacije. Omron kamera FHV7 je ena izmed najbolj naprednih pametnih kamer na trgu, opremljena je z visokozmogljivim dvojedrnim procesorjem, s katerim opravi celotno procesiranje aplikacije. Na voljo je širok nabor barvnih in monokromatskih senzorjev z ločljivostjo do 12 MP,
Glavni izziv pri izboru ustrezne kamere za strojni vid je zagotoviti, da bo sistem dovolj zmogljiv in prilagodljiv vsem zahtevam končne aplikacije. Omron kamera FHV7 je ena izmed najbolj naprednih pametnih kamer na trgu, opremljena je z visokozmogljivim dvojedrnim procesorjem, s katerim opravi celotno procesiranje aplikacije. Na voljo je širok nabor barvnih in monokromatskih senzorjev z ločljivostjo do 12 MP,  katere lahko združimo z optičnimi objektivi s fiksnim ali avtomatskim fokusom in vgrajeno ali zunanjo osvetlitvijo. Modularna zasnova, zmogljivost in napredni algoritmi kamere FHV7 zagotavljajo najoptimalnejšo rešitev za večino aplikacij strojnega vida.
katere lahko združimo z optičnimi objektivi s fiksnim ali avtomatskim fokusom in vgrajeno ali zunanjo osvetlitvijo. Modularna zasnova, zmogljivost in napredni algoritmi kamere FHV7 zagotavljajo najoptimalnejšo rešitev za večino aplikacij strojnega vida.
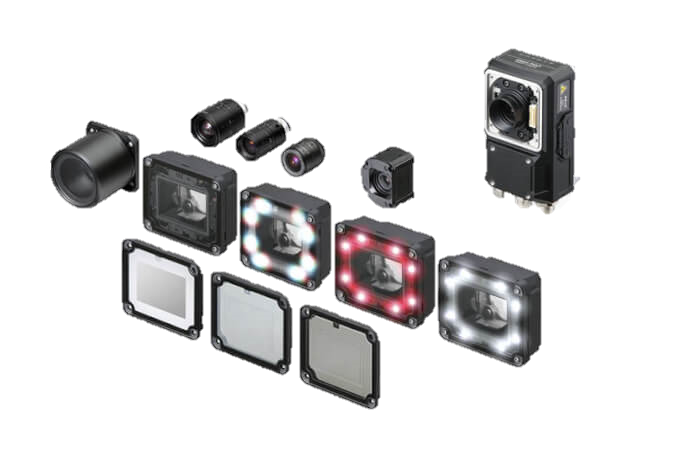
Modularnost in visoka zmogljivost za več inšpekcij na eni liniji
• Ponujamo širok nabor barvnih oz. monokromatskih CMOS senzorjev različnih ločljivosti slikovnih točk: 0,4 MP, 1,6 MP, 3,2 MP, 5,0 MP, 6,3 MP in 12,0 MP. Hitrosti zajemanja slike segajo do 430 fps (2,3 ms).
• Objektivi s samodejnim ostrenjem (Auto Focus) so na voljo v goriščnih razdaljah 6 mm, 9 mm, 12 mm, 16 mm in 25 mm.
• Na voljo so tudi objektivi s C-MOUNT standardno fiksno ostrino (fokusom).
• Vgrajeni so osvetlitveni moduli z možnostjo bele, rdeče, IR ali večbarvne osvetlitve.
• Dvojedrni procesor zagotavlja najhitrejšo obdelavo slik med vsemi ostalimi pametnimi kamerami.
• Robustno ohišje s stopnjo zaščite do nivoja IP67.
• Priložena so visokozmogljiva orodja strojnega vida iz serije FH.
• Podprte so standardne komunikacije Ethernet TCP/IP, EtherNet/IP, RS232, PROFINET in EtherCAT.

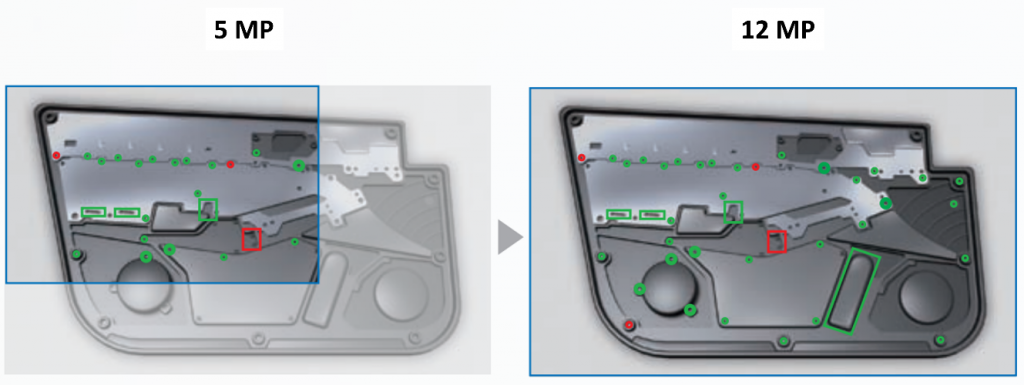
Kamerni senzor z do kar 12 MP ločljivostjo slikovnih točk omogoča visoko natančno vizualno kontrolo, kot tudi preverjanje širšega področja zajete slike. Visoka ločljivost senzorja odpravi potrebo po uporabi več-kamernega sistema ali mehanizma za premikanje kamer, da bi v aplikaciji lahko zajeli celotno območje kontroliranih točk, s tem pa zmanjša stroške projektiranja in same investicije v potrebno opremo.
VEČBARVNA OSVETLITEV
Večbarvna svetloba omogoča hitro rešitev ob spremembi zasnove izdelka ali kadar se doda nov model. Običajna rešitev je bila v menjavi osvetlitvene enote ali natančne prilagoditve programov, kar pa predstavlja dodatne stroške in daljši čas menjave programa. Z uporabo večbarvnega osvetlitvenega modula FHV-LTM-MC preprosto spremenimo parametre jakosti posameznih barv in sistem je pripravljen na novo kontrolo. Tako lahko z eno kamero opravimo inšpekcijo izdelkov različnih barv, kjer z ustrezno nastavitvijo barve svetlobe ustvarimo razliko kontrastov med ozadjem in detajlom.

FOTOMETRIČNA STEREO OSVETLITEV
Edinstveni algoritem za fotometrično stereo osvetlitev osvetli izdelek z več strani in nato iz posameznih slik sestavi končno sliko, ki zajema vse detajle. Glede na površino izdelka se pri usmerjeni svetlobi ustvarijo svetla in senčna območja, ki zanesljivo izpostavijo obliko tekstur in natisnjenih znakov. Ta funkcionalnost je na voljo z uporabo vgrajenega osvetlitvenega modula FHV-LTM-bela/ rdeča/ IR, ali pa zunanjega svetlobnega modula FL-PS.
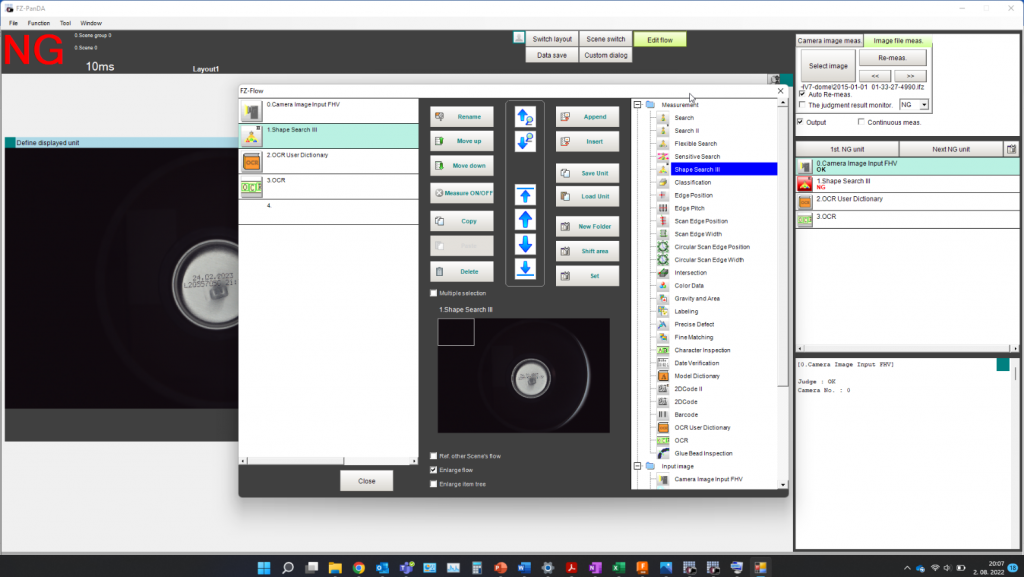
PROGRAMSKO ORODJE FZ-PanDA
Robustni in prilagodljivi uporabniški vmesnik »FZ-PanDA«, vsebuje več kot 100 orodij strojnega vida, slikovnih filtrov, matematičnih funkcij, kalibracij in kompenzacij, s pomočjo katerih lahko kreiramo aplikacije strojnega vida na najvišjem nivoju. Upravljanje s programom je po načinu »drag&drop«, s katerim si uporabnik lahko prilagodi postavitve zaslonov, gumbov, avtomatskega učenja, varnostnih prijav, menjave programov in še mnogo več.
NAPREDNA ORODJA STROJNEGA VIDA
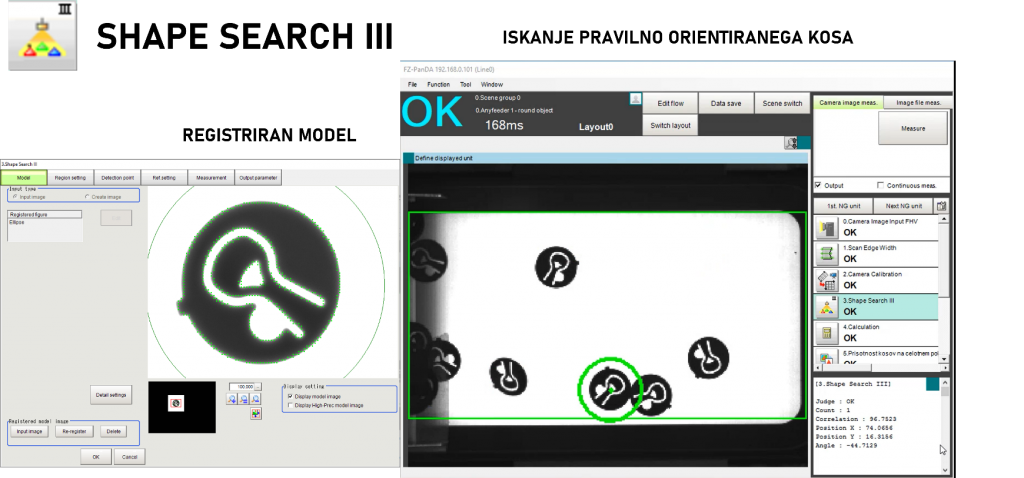
Shape search III
Algoritem omogoča visoko natančno in robustno iskanje oblik, tudi v neugodnih razmerah, kadar se spremeni okolje ali material izdelka. Shape search III zagotavlja stabilno delovanje tudi pri poškodovanih oblikah, prekrivanju in zamegljenosti. Naučeni obliki (model) definiramo pogoje (deformiranost, velikost in prekrivanje), ki vplivajo na končni rezultat meritve.
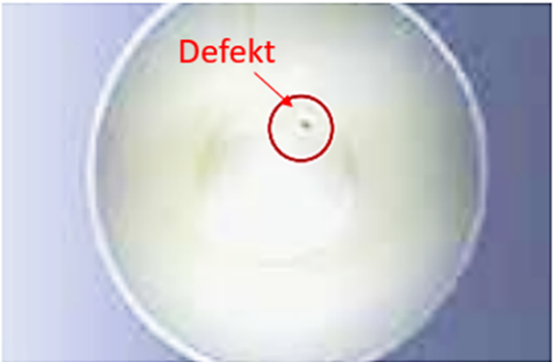
Precize Defect
Detekcija preciznih defektov
Algoritem je namenjen odkrivanju majhnih defektov, prask, nečistoč v materialu, tekstur in mehanskih poškodb. V nastavitvah lahko definiramo velikost defekta in določimo tolerančno mejo. Za odkrite defekte algoritem poda koordinatne vrednosti x, y in rotacijo.

BRANJE 2D, DPM IN OCR
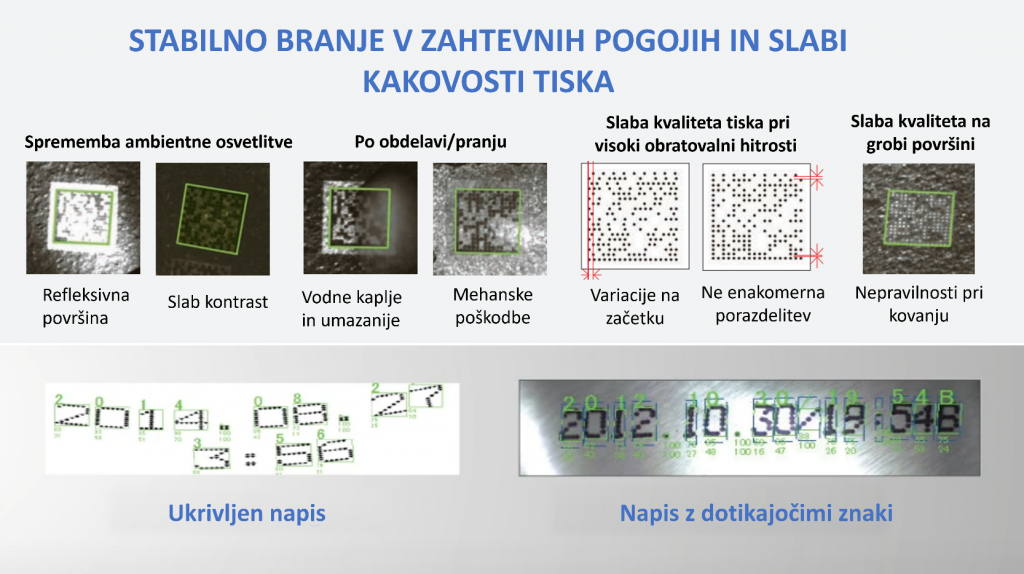
Fine matching
Algoritem primerja referenčno sliko dobre etikete z zajeto sliko. Razlike med slikama izpostavi in upošteva nastavljeno tolerančno mejo slabe slike. Na zapletenih vzorcih se lahko natančno zaznavajo praske, defekti, umazanije in manjše razlike pri visokih hitrostih.

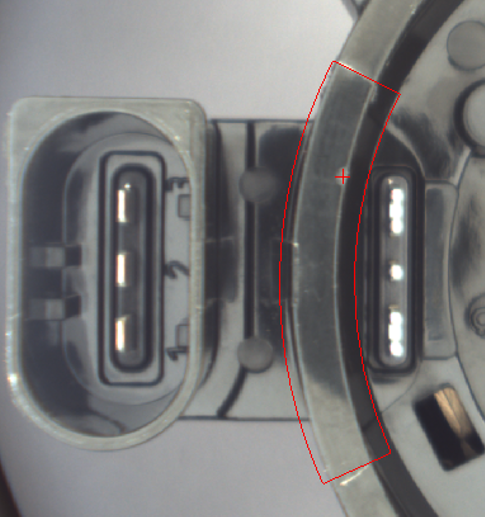
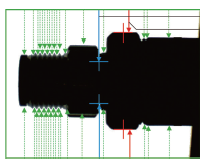 SCAN EDGE POSITION AND SCAN EDGE WIDHT
SCAN EDGE POSITION AND SCAN EDGE WIDHT
Algoritem opravi kontrolo dimenzijskih meritev kontur. Z iskanjem robov ugotovi medsebojno razdaljo in poda splošno meritev kot tudi maksimalno in minimalno vrednost. Algoritem je še posebej uporaben za merjenje globine utorov, navojev in prekinitev.
 Labeling
Labeling
Algoritem je primeren za kontrolo prisotnosti, izvoz specifičnih barv in štetje detajlov, katerim hkrati izmeri površino in težišče.

Izvoz samo specifični barvnih detajlov
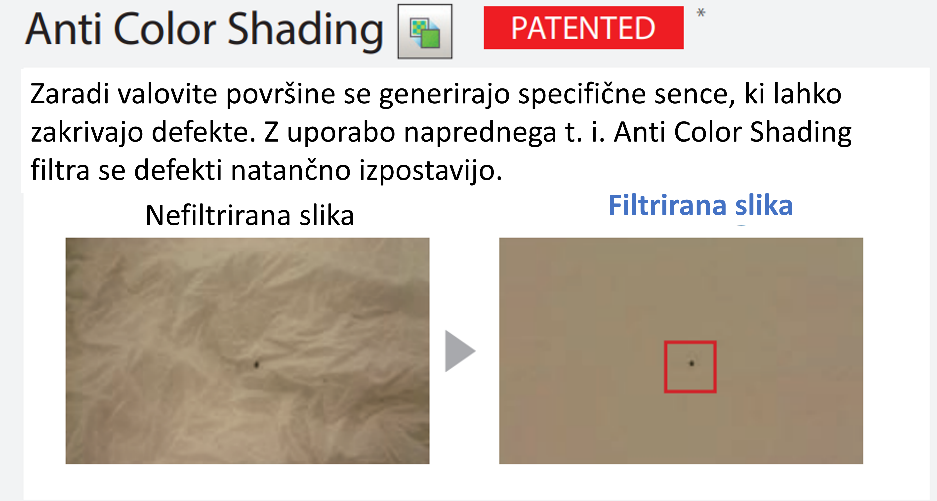
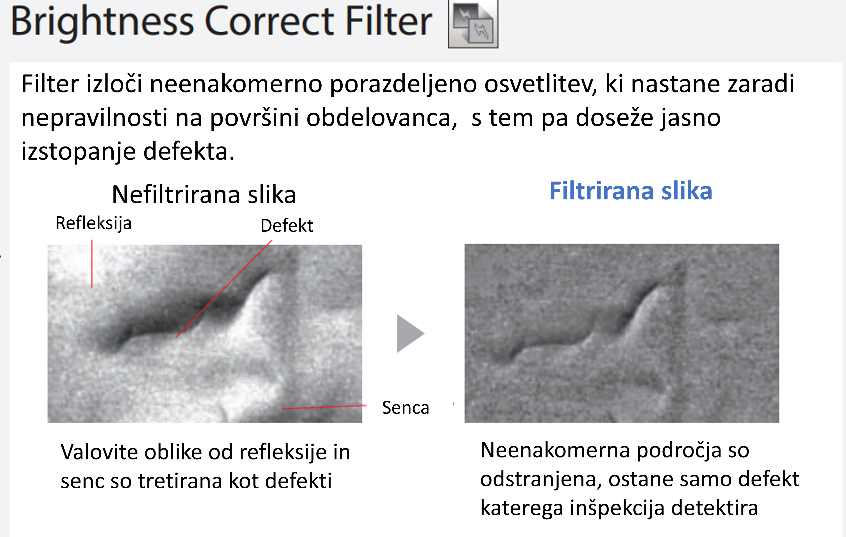
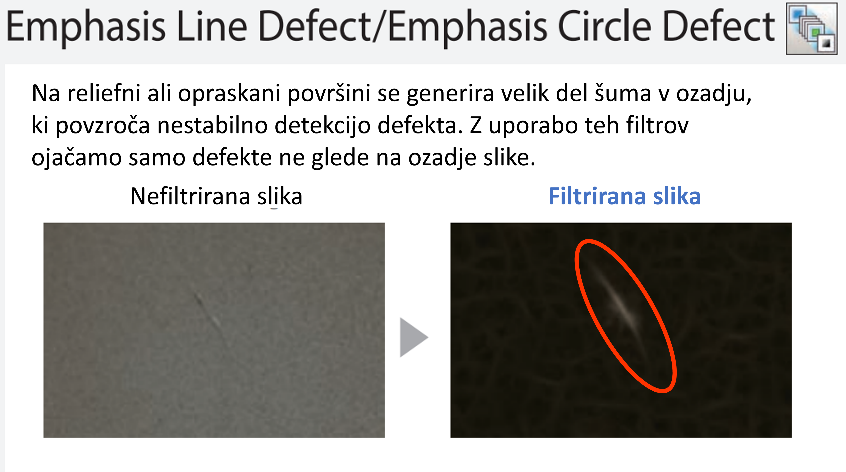
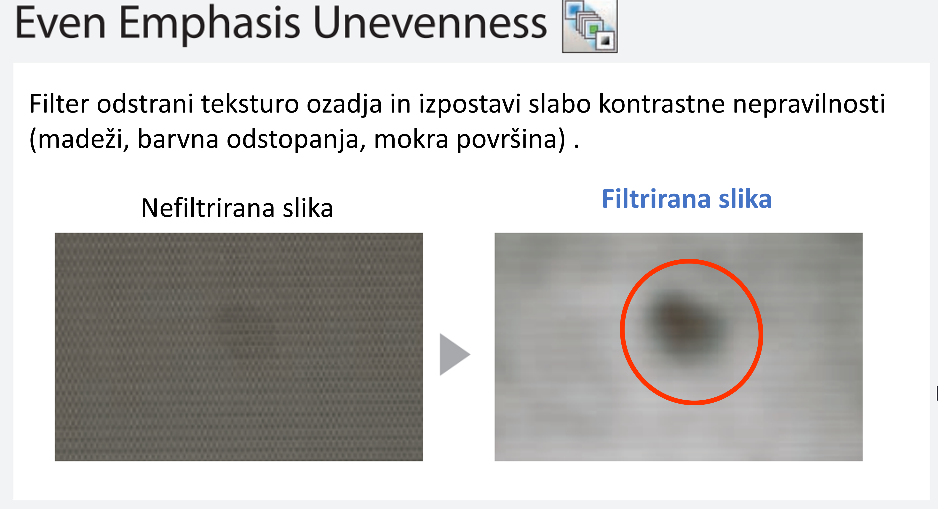
FILTRI ZA POUDARJANJE NAPAK
Odkrivanje defektov je lahko precej oteženo pri defektih, ki se nahajajo na kompleksnih površinah. Glavne probleme povzročajo: bleščanje, nagubana in strukturirana površina, ne enakomerna osvetlitev in opraskana površina, ki generirajo veliko motenj v sliki (šum).
S pomočjo 18 robustnih slikovnih filtrov lahko enostavno izpostavimo defekte, ki so skriti v kompleksni sliki. Za specifične primere pa je na voljo »Advanced Filtering«, kjer si lahko uporabnik sestavi unikatni filter do 16 slojev.

Vir: miel.si